CLASE 7 - GEOFÍSICA DE MEDIOS GRANULARES
STICK-SLIP Y FALLAS
GEOLÓGICAS EN LABORATORIO
THOMAS GALLOT,
CAMILA SEDOFEITO
Instituto de Física,
Facultad de Ciencias,
Universidad de la República
Plan de la clase
- El fenómeno: qué se observa
- El ciclo: carga → umbral → slip → relax
- Por qué ocurre: retroalimentación positiva
- Velocity weakening como eje central
- El modelo más simple: masa-resorte
- La competencia: rigidez vs debilitamiento
- Condición de inestabilidad (rigidez critica)
- Rate-and-State y Burridge-Knopoff
PUENTE — CLASE 6 → CLASE 7
En clase 6 vimos que μ no es constante.
Hoy vemos la consecuencia dinámica.
Lo que sabemos (Clase 6):
- μ depende del estado del contacto
- μ_s > μ_d: fricción estática > dinamica
- Healing: μ crece con el tiempo en reposo
- Velocity weakening: μ decrece con v
La pregunta de hoy:
¿Qué ocurre dinámicamente cuando μ decrece con la velocidad?
¿Bajo qué condiciones un sistema de fricción se vuelve inestable?
Cuando μ deja de ser constante, el sistema puede no encontrar un estado de equilibrio estable → stick-slip
El fenómeno: qué se observa
Cuando se carga lentamente un sistema de fricción, se observa una señal de fuerza característica:
¿Dónde aparece?
El ciclo stick-slip
El sistema se carga lentamente. La fricción estática μ_s impide el movimiento. La energía se almacena.
La fuerza alcanza T = μ_s P. El sistema está al limite del cono de Coulomb.
La fricción cae a μ_d < μ_s. La energía almacenada se libera como energía cinética.
El bloque frena. La fuerza cae por debajo de μ_d P. El ciclo reinicia.
No es un evento → es un proceso repetitivo.
¿Por qué ocurre? Retroalimentación positiva
El weakening como eje: tres casos
Todo el fenómeno depende de cómo varía μ con la velocidad.
μ = constante
No hay retroalimentación. No hay stick-slip.
μ crece con v
μ crece → fricción resiste el movimiento. Deslizamiento estable (creep asísmico).
μ decrece con v
μ decrece → retroalimentación positiva → posible stick-slip.
El modelo más simple: masa-resorte
Para capturar la competencia entre elasticidad y friction weakening:
Un bloque de masa \(m\) sobre superficie con fricción \(\mu(v)\), conectado a un driver que tira con velocidad \(V\):
| Elemento | Representa |
|---|---|
| Masa m | Bloque (o aspereza de una falla) |
| Resorte k | Rigidez elástica del sistema de carga |
| Velocidad V | Tasa de carga (vel. de placa tectónica) |
| Fricción μ(v) | Ley constitutiva del contacto |
El modelo más simple: masa-resorte
Para capturar la competencia entre elasticidad y friction weakening en su forma mas simple:
Un bloque de masa \(m\) sobre superficie con fricción \(\mu(v)\), conectado a un driver que tira con velocidad \(V\):
Si x < Vt: el resorte se tensa → energía almacenada.
Si x = Vt: equilibrio.
Si μ es constante → deslizamiento estable.
Si μ decrece con v → posible inestabilidad.
El núcleo físico: la competencia
El modelo revela dos mecanismos en competencia:
El resorte (k)
ESTABILIZA
Si el bloque acelera, el resorte se relaja → la fuerza disminuye → tiende a frenar el movimiento y devolver el equilibrio.
Realimentación negativa.
El weakening (dμ/dv < 0)
DESESTABILIZA
Si el bloque acelera, la friccion cae → la fuerza de oposicion disminuye → el bloque sigue acelerando.
Realimentación positiva.
k grande → el resorte gana → estable. k pequeño → el weakening gana → stick-slip.
Condición de inestabilidad
El sistema es inestable (stick-slip) cuando la fricción decrece con la velocidad: \(d\mu/dv < 0\).
Rigidez crítica:
Interpretación gráfica:
Rice & Ruina, J. Appl. Mech. 50, 343 (1983).
Derivación de la rigidez crítica
Perturbamos el estado estacionario de deslizamiento ($\dot{x} = V$):
$F_s = k(Vt-x) \;\Rightarrow\; k = -\dfrac{\partial F_s}{\partial x}$
$m\,\delta\ddot{x} = -k\,\delta x - \dfrac{dF_f}{dx}\,\delta x$
$m\,\delta\ddot{x} = -\!\left(k + \dfrac{dF_f}{dx}\right)\delta x$
$k_c = -\dfrac{dF_f}{dx}\bigg|_V = mg\!\left|\dfrac{d\mu}{d\dot{x}}\right|_V$
Consecuencias:
Rice & Ruina, J. Appl. Mech. 50, 343 (1983).
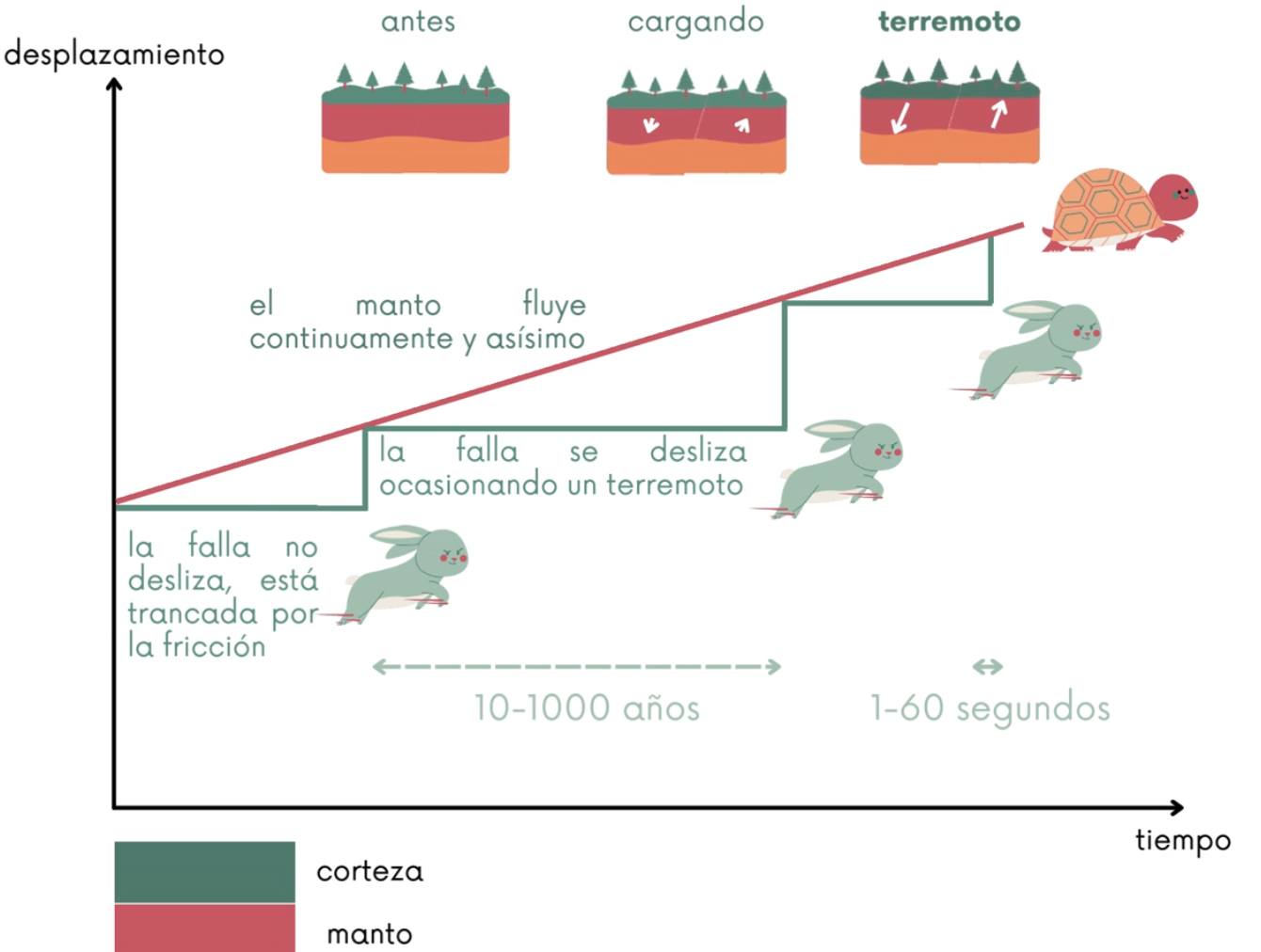
Aplicación: fallas geológicas y ciclo sísmico
Las zonas de falla contienen una capa de gouge (material granular triturado). El ciclo sísmico es stick-slip a escala geológica:
| Modelo | Falla geologica |
|---|---|
| Masa m | Aspereza (zona bloqueada de la falla) |
| Resorte k | Rigidez elástica de la corteza |
| Velocidad V | Velocidad de la placa tectónica |
| Friccion μ(v) | Fricción en la zona de cizallamiento |
| Fase stick | Periodo interSísmico (carga lenta) |
| Fase slip | Ruptura cosísmica (terremoto) |
Scholz, The Mechanics of Earthquakes and Faulting (2019).
Modelo Rate-and-State
Ley empírica de fricción que captura la dependencia en velocidad y el envejecimiento del contacto:
Stick-Slip vs Rate-and-State:
| Stick-Slip | Rate-and-State | |
|---|---|---|
| Tipo | Fenómeno dinámico | Ley constitutiva |
| Describe | Oscilaciones | Como cambia μ |
| Base | Puede existir con Coulomb simple | Introduce memoria explicita |
| Envejecimiento | No incluye | Incluye evolucion del contacto |
Dieterich (1979); Ruina (1983); Marone (1998).
Modelo Rate-and-State
Ley empírica de fricción que captura la dependencia en velocidad y el envejecimiento del contacto:
Stick-Slip vs Rate-and-State:
Aging: \(\dot{\theta} = 1 - \dfrac{v\,\theta}{D_c}\)
Slip: \(\dot{\theta} = -\dfrac{v\,\theta}{D_c}\ln\!\left(\dfrac{v\,\theta}{D_c}\right)\)
\(a - b > 0\): velocity strengthening → creep asísmico
Dieterich (1979); Ruina (1983); Marone (1998).
Modelo de Burridge-Knopoff (1967)
Extensión del bloque único a una cadena de \(N\) bloques acoplados elásticamente:
- \(K\) = acoplamiento entre asperidades (rigidez de la corteza)
- \(k_p\) = acoplamiento con la placa tectonica
- \(v\) = velocidad de la placa
- \(F(v)\) = fricción velocity-dependent
Burridge & Knopoff, Bull. Seismol. Soc. Am. 57, 341 (1967).
IDEAS CLAVE — CLASE 7
Stick-slip: un mecanismo universal
El fenómeno
Señal en diente de sierra. Un ciclo periodico de carga lenta y liberación abrupta de energía elástica.
El mecanismo
Velocity weakening → retroalimentación positiva → el sistema no puede encontrar un estado estacionario estable.
La condición
k < k_c: el weakening gana a la rigidez. No todo sistema con weakening produce stick-slip.
El mismo mecanismo a todas las escalas: